Abstract
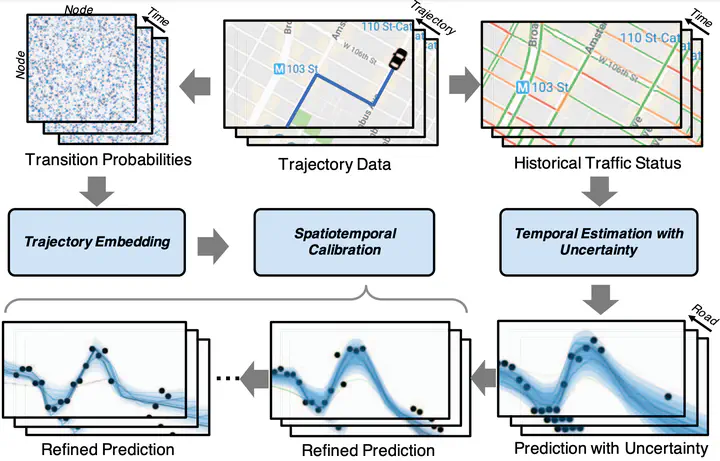
Traffic state estimation is among the most critical issues in intelligent transport systems, and it has been widely explored for years considering its significance for diverse industrial applications such as vehicle dispatch and route planning. The availability of vehicle trajectories has provided a promising data source for traffic estimation, as it shed light on traffic status and characterizes human transition activates that are otherwise extremely hard to track. However, there are major challenges in incorporating trajectories in traffic estimation largely because of its inherent uncertainty from data sparsity and semantic ambiguity. Entangled in complicated road topology and spatiotemporal traffic dynamics, properly embedding trajectories in modeling is especially difficult. To address the aforementioned challenges, in this paper, we propose a Boosted Trajectory Calibration (BTRAC) framework to model traffic states of complex road networks that effectively integrates trajectory information. In the framework, we first use a deep neural network to predict the traffic states of each road individually from historical traffic information, along with the prediction uncertainty. Then we refine the predictions by an iterative boosting calibration procedure with embedded trajectories. We conduct extensive large-scale empirical studies on two cities and demonstrate the effectiveness of the proposed approach.